FAEP复现
使用WSL2安装Ubuntu-20.04,环境配置,并复现项目Zyhlibrary/FAEP
作业报告PDF版见FAEP/智能机器人课程作业报告
安装WSL与Ubuntu-20.04
可以参考官方文档:适用于 Linux 的 Windows 子系统文档 | Microsoft Learn
如果是第一次安装WSL,我们可以直接在在Powershell中执行命令来完成安装
系统中自带的Powershell是旧版,可以参考PowerShell 文档 - PowerShell | Microsoft Learn来安装新版Powershell(装不装都行,只是提一嘴)
注意,在安装Linux发行版前,最好关闭可能修改hosts文件的软件,比如Watt Toolkit的Hosts加速
因为这可能会让你的新系统的hosts文件变成一坨,如果这已经发生了,那么修改hosts文件就好
1 | sudo nano /etc/hosts |
使用管理员身份运行Powershell
执行命令
1
2# 安装WSL,但不安装Linux发行版
wsl --install --no-distribution重启电脑,再次使用管理员身份运行Powershell
执行命令
1
2# 安装Ubuntu-20.04
wsl --install Ubuntu-20.04等待一段时间,安装完成后会自己启动WSL,需要新建用户名和密码
注意:输入密码时为盲人键入,光标会保持在原处,正常键入密码即可
关闭Power shell,可以直接搜索Ubuntu来打开其终端,使用Powershell可能会出现一些问题
微软官方推荐使用Windows Terminal,Terminal的安装参见:Windows 终端概述 | Microsoft Learn
如果想要卸载Linux发行版,命令如下:
1 | # 查看已安装的发行版信息 |
如果忘记了用户密码可以参照:技术|在 WSL 上忘记了 Linux 密码?下面是如何轻松重设的方法
解决:“wsl: 检测到 localhost 代理配置,但未镜像到 WSL。NAT 模式下的 WSL 不支持 localhost 代理”
如果想要安装其他Linux发行版系统,可以查看可下载的系统
1 | # 查看可用发行版列表 |
修改软件包源并安装ROS
使用nano打开软件源文件,删除所有原有官方源
1
sudo nano /etc/apt/sources.list
粘贴以下内容,注意,以下内容仅适用于Ubuntu-20.04
如果需要其他版本系统的软件包镜像源,具体可查看ubuntu | 镜像站使用帮助 | 清华大学开源软件镜像站 | Tsinghua Open Source Mirror
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15# 默认注释了源码镜像以提高 apt update 速度,如有需要可自行取消注释
deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ focal main restricted universe multiverse
# deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ focal main restricted universe multiverse
deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ focal-updates main restricted universe multiverse
# deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ focal-updates main restricted universe multiverse
deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ focal-backports main restricted universe multiverse
# deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ focal-backports main restricted universe multiverse
# 以下安全更新软件源包含了官方源与镜像站配置,如有需要可自行修改注释切换
deb http://security.ubuntu.com/ubuntu/ focal-security main restricted universe multiverse
# deb-src http://security.ubuntu.com/ubuntu/ focal-security main restricted universe multiverse
# 预发布软件源,不建议启用
# deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ focal-proposed main restricted universe multiverse
# # deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ focal-proposed main restricted universe multiverseCtrl+O并回车保存,Ctrl+X退出编辑器
更新软件包目录及软件包
1
2sudo apt update
sudo apt upgrade -y添加ROS安装源及配置密钥
1
2
3sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
sudo apt update1
2# 如果装不上密钥,可以尝试
wget http://packages.ros.org/ros.key -O - | sudo apt-key add -ROS源的添加参考了:ros | 镜像站使用帮助 | 清华大学开源软件镜像站 | Tsinghua Open Source Mirror
安装ROS并配置环境变量
1
2
3sudo apt install ros-noetic-desktop-full
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
安装CUDA Toolkit
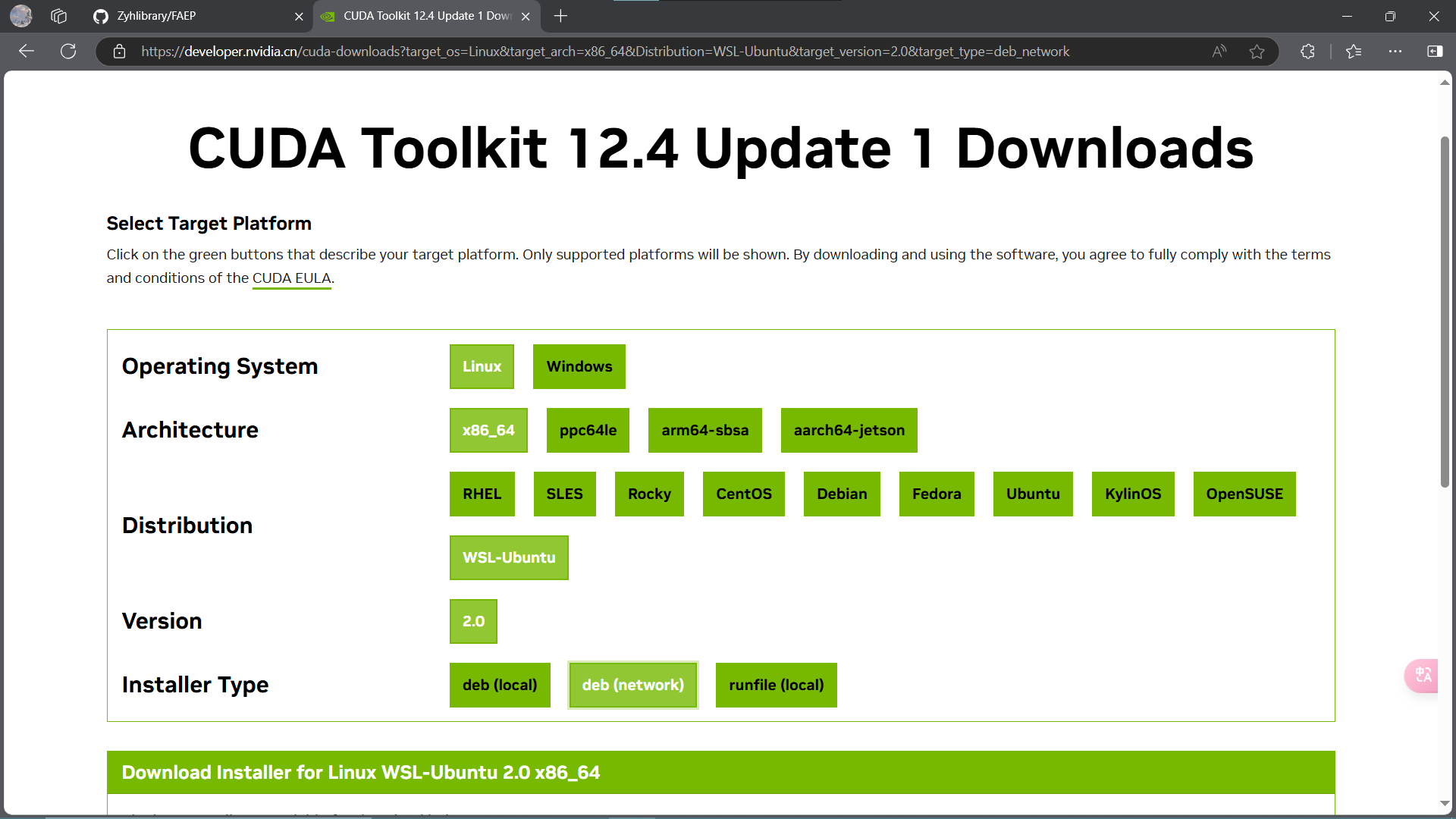
安装Toolkit
CUDA Toolkit 12.4 Update 1 Downloads | NVIDIA 开发者
做以下选择,可以得到安装命令,当然,可以选择其他cuda版本的Toolkit
需要注意的是: 在安装CUDA Toolkit时,一定要安装WSL版本的,否则物理机映射的CUDA会被覆盖
命令如下,一条一条执行即可:
1
2
3
4wget https://developer.download.nvidia.com/compute/cuda/repos/wsl-ubuntu/x86_64/cuda-keyring_1.1-1_all.deb
sudo dpkg -i cuda-keyring_1.1-1_all.deb
sudo apt-get update
sudo apt-get -y install cuda-toolkit-12-4配置环境变量并启用
1
2
3
4echo "export CUDA_HOME=/usr/local/cuda" >> ~/.bashrc
echo "export PATH=\$PATH:\$CUDA_HOME/bin" >> ~/.bashrc
echo "export LD_LIBRARY_PATH=/usr/local/cuda-12.4/lib64\${LD_LIBRARY_PATH:+:\${LD_LIBRARY_PATH}}" >> ~/.bashrc
source ~/.bashrc启用OpenGL硬件渲染
更换为Ubuntu20.04的原因之一就在于此,Ubuntu18.04的Mesa版本为20.x,这不支持OpenGL硬件渲染,而使用llvm渲染会使得仿真过程很卡顿。
当然,你可以选择继续使用Ubuntu18.04,并且如果想要更新Mesa,可以参照:如何在 Ubuntu 上安装 Mesa 驱动程序
1
2sudo apt install mesa-utils
glxinfo | grep OpenGL从返回的信息我们可以看到OpenGL 渲染器使用了显卡
如果你有多张显卡或者被核显困扰,想要更改使用的显卡,可以参照:WSLg 中的 GPU 选择 · 微软/wslg Wiki
复现FUEL
HKUST-Aerial-Robotics/FUEL: An Efficient Framework for Fast UAV Exploration
安装依赖
1
2
3
4
5
6
7
8git clone -b v2.7.1 https://github.com/stevengj/nlopt.git
cd nlopt
mkdir build
cd build
cmake ..
make
sudo make install
sudo apt-get install libarmadillo-dev编译FUEL包
回到用户目录下,新建工作空间
1
2
3cd ~
mkdir -p fuel_ws/src
cd fuel_ws/src克隆并修改包
1
git clone https://github.com/HKUST-Aerial-Robotics/FUEL.git
修改文件,在
uav_simulator/local_sensing/CMakelist.txt中如果你的显卡是10系,其架构是Pascal,其算力值为sm_61
如果你的显卡是20系,其架构是Turing,其算力值为sm_75
如果你的显卡是30系,其架构是Ampere,其算力值为sm_86
如果你的显卡是40系,其架构是Ada,其算力值为sm_89
详见:CUDA GPUs - Compute Capability | NVIDIA Developer
1
2
3
4
5
6
7
8
9
10
11
12set(CUDA_NVCC_FLAGS
# -gencode arch=compute_20,code=sm_20;
# -gencode arch=compute_20,code=sm_21;
# -gencode arch=compute_30,code=sm_30;
# -gencode arch=compute_35,code=sm_35;
# -gencode arch=compute_50,code=sm_50;
# -gencode arch=compute_52,code=sm_52;
# -gencode arch=compute_60,code=sm_60;
# -gencode arch=compute_75,code=sm_75;
-gencode arch=compute_86,code=sm_86;
# -gencode arch=compute_89,code=sm_89;
)回到工作空间下,编译包
部分可能会出现Anaconda的环境变量导致编译失败的,可以删除Win中的Anaconda环境变量
1
2cd ..
catkin_make运行仿真示例
在工作空间下执行命令
1
source devel/setup.bash && roslaunch exploration_manager rviz.launch
新终端,同样在工作空间下执行
1
source devel/setup.bash && roslaunch exploration_manager exploration.launch
使用
2D Nav Goal触发仿真,在使用硬件加速后明显没有那么卡顿了选择不同的探索环境
在
FUEL/fuel_planner/exploration_manager/launch/simulator.xml中第22行1
<node pkg ="map_generator" name ="map_pub" type ="map_pub" output = "screen" args="$(find map_generator)/resource/office.pcd"/>
可用的环境在
FUEL/uav_simulator/map_generator/resource/下
复现FAEP
安装依赖
1
sudo apt-get install libdw-dev
创建工作空间
1
2mkdir -p faep_ws/src
cd faep_ws/src克隆并修改包
1
git clone https://github.com/Zyhlibrary/FAEP.git
同样修改
uav_simulator/local_sensing/CMakelist.txt文件然后,步骤变多了,不知道为什么这个傻鸟作者好好的把FUEL中的配置给删了
使用FUEL对应位置的文件内容来替换
"FAEP/faep_planner/bspline_opt/CMakeLists.txt"中的内容在
faep_ws/src/下,修改CMakelist.txt文件这个是为了改起来方便,因为这个傻鸟把所有
CMakelist.txt文件里的C++14都删了,懒得一个一个改1
sudo nano CMakeLists.txt
在其中添加使用C++14
1
set(CMAKE_CXX_STANDARD 14)
回到工作空间
~/faep_ws下,编译包部分可能会出现Anaconda的环境变量导致编译失败的,可以删除Win中的Anaconda环境变量
1
2cd ..
catkin_make运行仿真示例
在工作空间下执行命令
1
source devel/setup.bash && roslaunch exploration_manager rviz.launch
新终端,同样在工作空间下执行
1
source devel/setup.bash && roslaunch exploration_manager exploration.launch
使用
2D Nav Goal触发仿真